Work in progress. Mac app which uses Kinect.
The libfreenect library includes a very helpful example, but I had to work extra hard to make sense of the code which translates the depth buffer value to some rgb value for display. Visualizing depth values could be done a million ways. Initially, I just scaled the value to 8-bit for grayscale. But I was intrigued by the logic in this example code.
First off, if you initialize the depth camera like so:
freenect_set_depth_mode(f_dev, freenect_find_depth_mode(
FREENECT_RESOLUTION_MEDIUM, FREENECT_DEPTH_11BIT));And if we use the routine from the glview.c linked above, we get an
image with a color range like this:
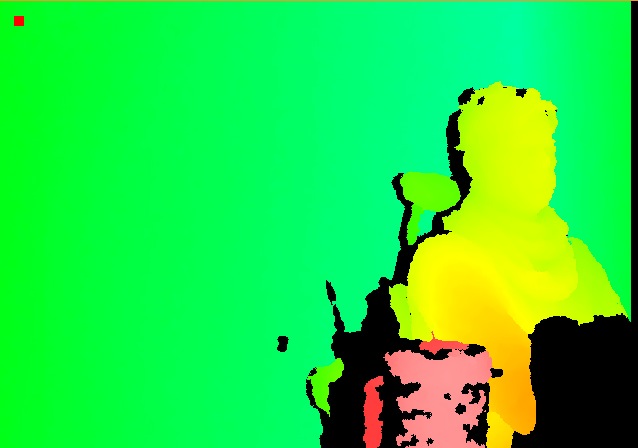
the red dot is just some opengl drawing, ignore that
Ok so, in this mode, the depth camera is giving us 11-bit (2048)
values. The first step done for each sample, is a lookup in
the t_gamma array, of length 2048. The array is initialized like so:
// init gamma array
for (int i=0; i < 2048; i++) {
float v = i / 2048.0;
v = powf(v, 3) * 6;
t_gamma[i] = v * 6 * 256;
}If we plot the array, to visualize like a function, we get:
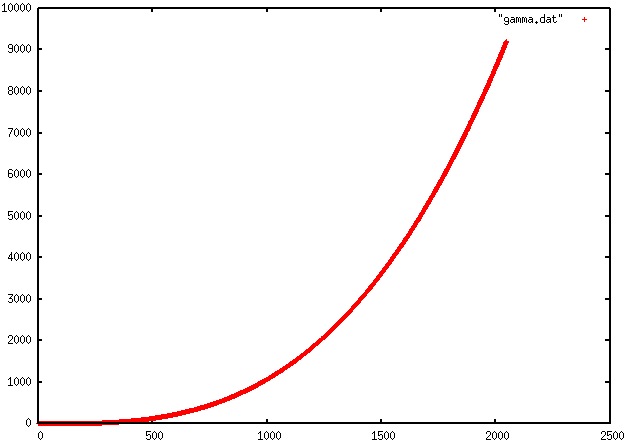
Math is not my strong suit, but I interpret this as normalizing the
range 0 to 2047 to 0 to 1. Then scaling with an exponent of 3 and a
constant 6 * 6 * 256. So why choose these values?
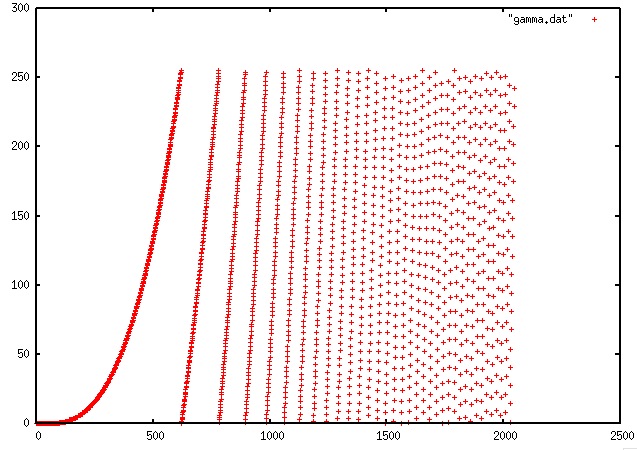
Next, the value looked up in the gamma array, is bitwise and'd
(masked) with 0xff, which means we're sort of chopping off the
significant bits beyond 8. If we were to plot it, we get:
Copyright © 2013
Distributed under the Eclipse Public License either version 1.0 or (at your option) any later version.