HiRISE_Anaglyphs
HiRISE Anaglyphs ¶
Using Stereo Observations: RED CCD[0-9]
Note : This anaglyph procedure is recommended for lowerlatitude
coverage; Polar region stereo coverage is more complicated and has not
been ‘stream-
lined’ yet.
Preparation - SPICE ¶
- Select two stereo observations
- Begin with calibrated images
- Geometric control is an option (ccd-to-ccd)
- Run spiceinit on all RED CCD’s0-9 for both observations
- Default to system shape model
- Kernels Group with loaded SPICE keywords
Group = Kernels
NaifIkCode = -74699
LeapSecond = $base/kernels/lsk/naif0008.tls
TargetAttitudeShape = $base/kernels/pck/pck00008.tpc
TargetPosition = Table
InstrumentPointing = Table
Instrument = Null
SpacecraftClock = $mro/kernels/sclk/MRO_SCLKSCET.00021.65536.tsc
InstrumentPosition = Table
Frame = $mro/kernels/fk/mro_v08.tf
InstrumentAddendum = $mro/kernels/iak/hiriseAddendum003.ti
ShapeModel = $base/dems/molaMarsPlanetaryRadius0001.cub
End_Group
Run spicefit on all Red CCD’s 0-9 for both image observations ¶
- spicefit from=psp_red0.cub...
- Take ‘an’ approach to figure out the map information
maptemplate fromlist=img1_0-9.lis map=img1.map proj=EQUIRECTANGULAR clat=0.0 clon=0.0 rngopt=CALC resop=CALC
maptemplate fromlist=img2_0-9.lis map=img2.map proj=EQUIRECTANGULAR clat=0.0 clon=0.0 rngopt=CALC resop=CALC
- Evaluate the information within img1.map and img2.map
- Figure out the map values that will satisfy the coverage of both
observations
- latitude range, longitude rangecenter latitude, center longitude
- average pixel resolution
Retrieve the “local radius” ¶
- The default system shape model will be referenced (spiceinit)
- Specify the center of each observation
campt from=psp_red5_img1.cub samp=1 line=(nlines/2) to=red5_pt1.dat
getkey from=red5_pt1.dat grpnname=GroundPointkeyword=LocalRadius
campt from=psp_red5_img2.cub samp=1 line=(nlines/2) to=red5_pt2.dat
getkey from=red5_pt2.dat grpname=GroundPointkeyword=LocalRadius
- Calculate the average “local radius” value
- Convert the average value from meters to kilometers
- Build a NAIF-format text file with the average local radius (km)
- “LocalRad3391.97.tpc”contents
\begindata
BODY499_RADII = ( 3391.97 3391.97 3391.97)
Modify Labels ¶
- For both observations; all Red CCD’s0-9
- Remove ShapeModel reference from labels
editlab from=psp_red0_img1.cub options=modkeygrpname=Kernels keyword=ShapeModel value=Null
- Now add the “new” NAIF .tpcfile with the local radius to the Kernels group
editlab from=psp_red0_img1.cub options=modkeygrpname=Kernels keyword=Instrument keyvalue= LocalRad3391.97.tpc
- Note : We are temporarily using an ‘unused’ keyword (Instrument) for the local radius .tpcfile; this keyword follows the main “TargetAttitudeShape”keyword which MUST retain reference to the original NAIF .tpcfile (we are mimicking a ‘search’ list for radius value).
Kernels Group with modified keywords ¶
Group = Kernels
NaifIkCode = -74699
LeapSecond = $base/kernels/lsk/naif0008.tls
TargetAttitudeShape = $base/kernels/pck/pck00008.tpc
TargetPosition = Table
InstrumentPointing = Table
Instrument = LocalRad3386.70.tpc
SpacecraftClock = $mro/kernels/sclk/MRO_SCLKSCET.00021.65536.tsc
InstrumentPosition = Table
Frame = $mro/kernels/fk/mro_v08.tf
InstrumentAddendum = $mro/kernels/iak/hiriseAddendum003.ti
ShapeModel = Null
End_Group
-
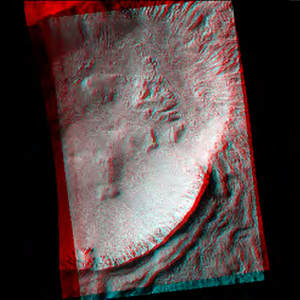
Local Radius retains both high and low frequency stereo data -
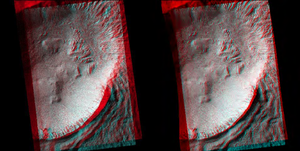
The mapping results for left/right views are too far apart -
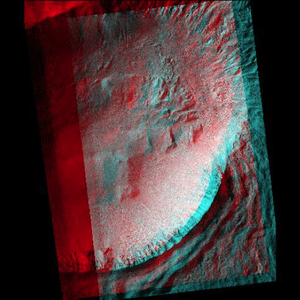
All stereo information removed -
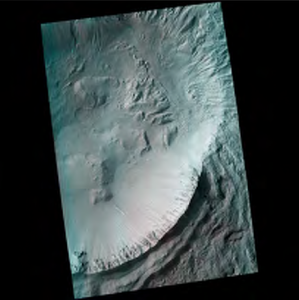
Low frequency stereo information is removed; (e.g., gentle slopes across the scene)





Map Projection - Template ¶
- Build a Map Template for cam2map
- Specify the Ellipsoid values for Mars Contents:
::::::::::::::
equi.map
::::::::::::::
Group = Mapping
ProjectionName = Equirectangular
CenterLongitude = 353.18
CenterLatitude = 8.06
TargetName = mars
EquatorialRadius = 3396190.0 <meters>
PolarRadius = 3376200.0 <meters>
LatitudeType = Planetocentric
LongitudeDirection = PositiveEast
LongitudeDomain = 360
PixelResolution = 0.28 <meters/pixel>
End_Group
End
Map Projection ¶
- Run
cam2map
on both observations
- all Red ccd’s[0-9]
cam2map from=psp_red0_img1.cub map=equi.mapto=psp_red0_eq.cub pixres=map defaultrange=camera
- OR Use the -batchlist option
cam2map –batchlist=all_reds.lis from=\$1.balance.cub to=\$1.eq.cub pixres=map defaultrange=camera
- all_reds.lis should not include file extensions
- Allow cam2map to figure out the lat/lon boundaries of each individual ccd
Create Two Red[0-9] Mosaics ¶
- Create a list of cam2map output files for each observation
- Mosaic the projected Red CCD’s
- Specify the same latitude/longitude boundaries for the output mosaics
automos fromlist=img1_eq.lis mosaic=img1_RedMos.cub grange=user minlat= maxlat= minlon= maxlon=
automos fromlist=img2_eq.lis mosaic=img2_RedMos.cub grange=user minlat= maxlat= minlon= maxlon=
- Refer to the camptoutput files that was executed previously
getkey from=red5_pt1.dat grpnname=GroundPointkeyword=SubSpacecraftLongitude
getkey from=red5_pt2.dat grpnname=GroundPointkeyword=SubSpacecraftLongitude
- The observation image whose SubspacecraftLongitude is the farthest
West, is the “Left Look”
- (subspc1 < subspc2) or (subspc2 < subspc1)
Assumptions ¶
- Observation pair has a longitude range within 0 –360 longitude
- LongitudeDomain= 360
- Neither image pair crosses the 0 and/or the 360 longitude boundary
- cam2map defaults to reassigning the LongitudeDomain if the image crosses a 0/360/180 boundary
Stack Left/Right Observations ¶
- Create a text file for cubeit
ls left_redmos_img.cub > c.lis
ls right_redmos_img.cub >> c.lis
- cubeit list=c.lis to=anag.cub
- Display anag.cub with qview
Band1 = Red
Band2 = Green
Band2 = Blue
Local_Radius_bad_example.png View (436 KB) Ian Humphrey, 2016-05-31 04:22 PM
Hirise_stereo_information_removed.png View (258 KB) Ian Humphrey, 2016-05-31 04:22 PM
Hirise_low_freq_removed_gentle_slopes.png View (377 KB) Ian Humphrey, 2016-05-31 04:22 PM
Hirise_local_radius_both_high_and_low.png View (829 KB) Ian Humphrey, 2016-05-31 04:22 PM
Gullies_MOLA_Stereo_Profile.png View (123 KB) Ian Humphrey, 2016-05-31 04:23 PM
{kind=link}